卷积神经网络CNN
CNN的原理
从DNN到CNN
卷积层与汇聚
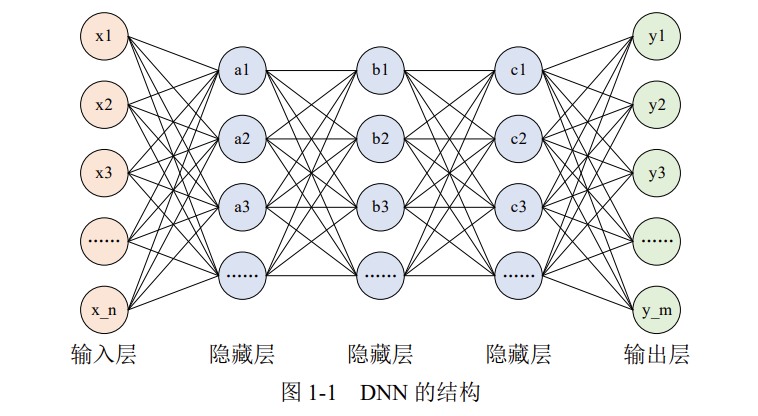
- 深度神经网络DNN中,相邻层的所有神经元之间都有连接,这叫全连接;
- DNN的全连接层对应CNN的卷积层,汇聚是与激活函数类似的附件;
- 单个卷积层的结构是:卷积层-激活函数-(汇聚),其中汇聚可以省略。
CNN:专攻多维数据
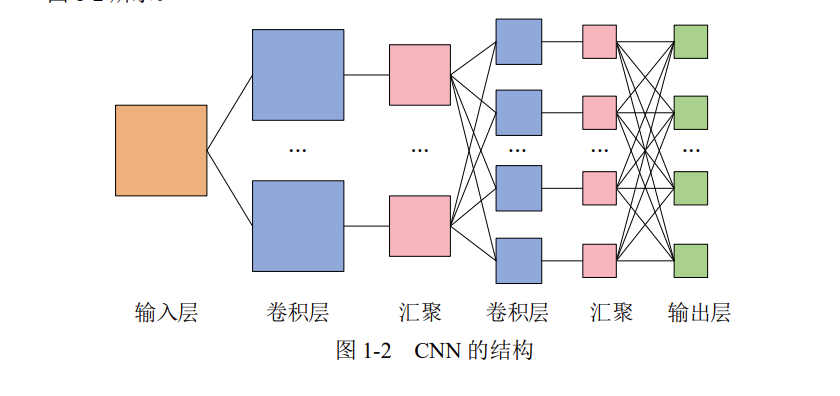
在深度神经网络 DNN 课程的最后一章,使用 DNN 进行了手写数字的识别。但是,图像至少就有二维,向全连接层输入时,需要多维数据拉平为 1 维数据,这样一来,图像的形状就被忽视了,很多特征是隐藏在空间属性里的。
而卷积层可以保持输入数据的维数不变,当输入数据是二维图像时,卷积层会以多维数据的形式接收输入数据,并同样以多维数据的形式输出至下一层,如下图所示。
卷积层
CNN 中的卷积层与 DNN 中的全连接层是平级关系,全连接层中的权重与偏置即 \(y = w_1x_1 + w_2x_2 + w_3x_3 + b\)中的\(w\)和\(b\),卷积层中的权重与偏置变得稍微复杂。
内部参数:权重(卷积核)
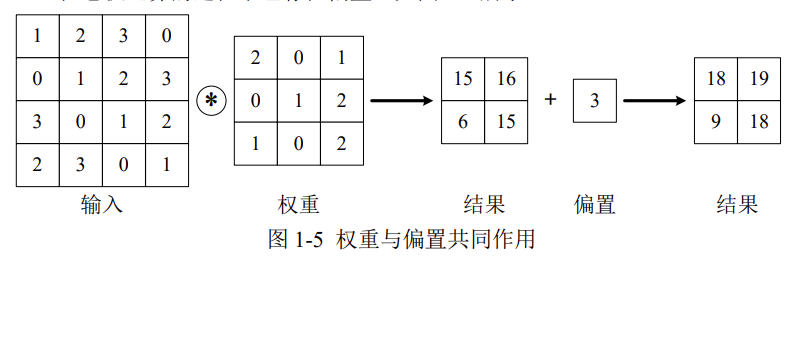
当输入数据进入卷积层后,输入数据会与卷积核进行卷积运算。
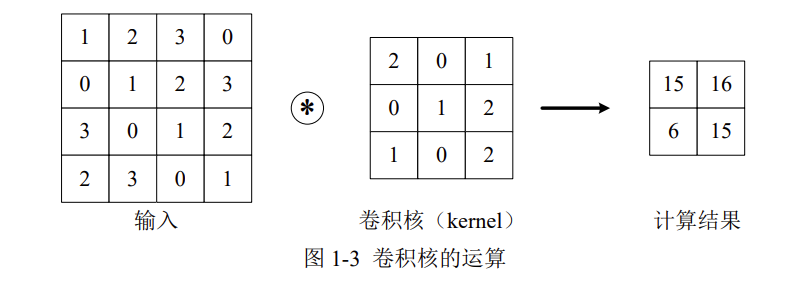
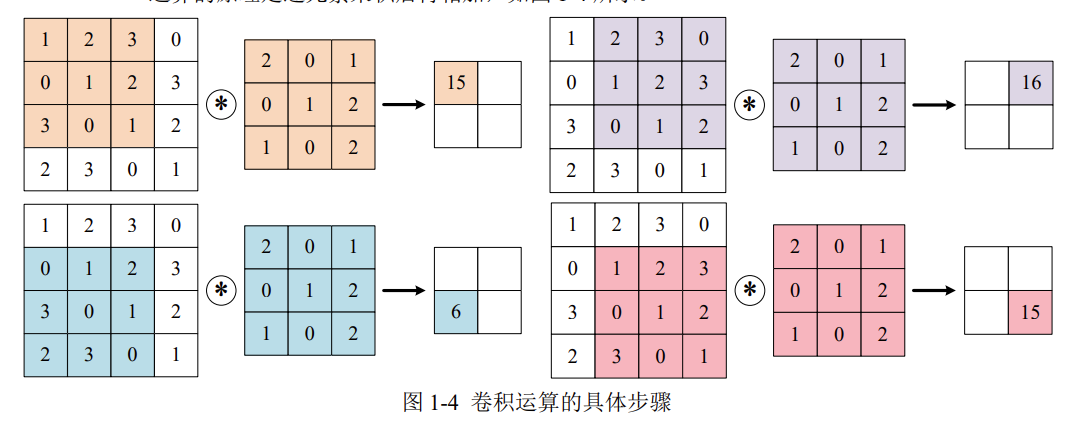
上图中,输入大小是(4,4),卷积核大小是(3,3),输出大小是(2,2)。卷积运算的原理是逐元素乘积后再相加。
内部参数:偏置
在卷积运算的过程中也存在偏置,如下图所示。
外部参数:填充
为了防止经过多个卷积核后图像越卷越小,可以在进行卷积层的处理之前,向输入数据的周围填入固定的数据(比如0),这称为填充(padding)。
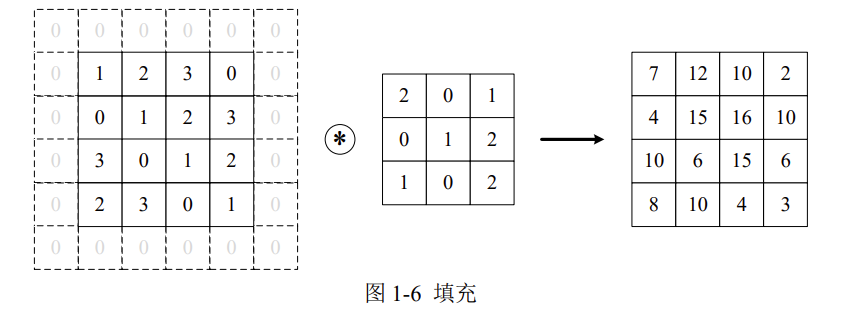
例如,上图中对于输入数据应用了幅度为1的填充,填充值为0。
外部参数:步幅
使用卷积核的位置间隔被称为步幅(stride),之前的例子中步幅都是1,如果将步幅设为2,此时使用卷积核的窗口的间隔变为了2。
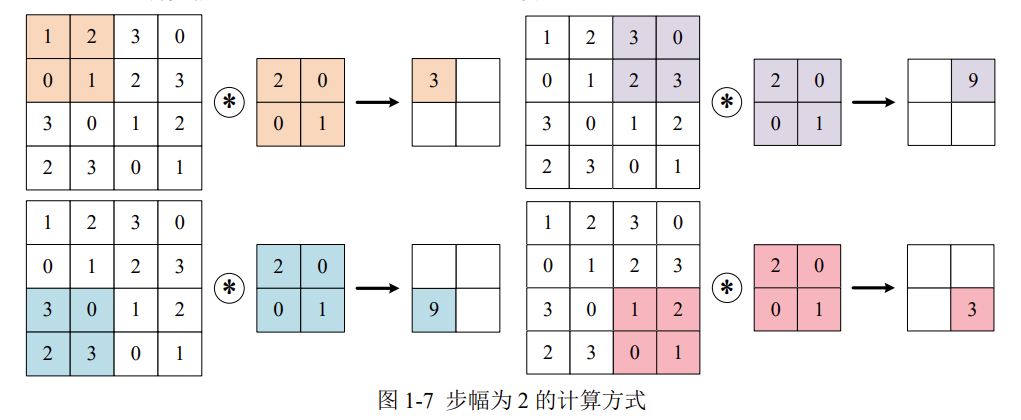
综上,增大填充后,输出尺寸会变大;而增大步幅后,输出尺寸会变小。
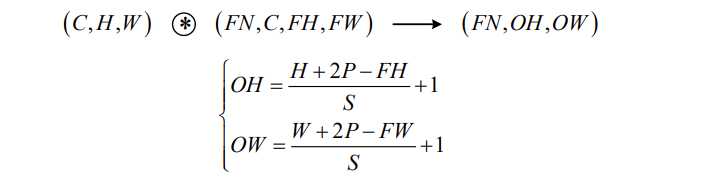
输入与输出尺寸的关系
假设输入尺寸为\((H, W)\),卷积核的尺寸为\((FH, FW)\),填充为 \(P\),步幅为 \(S\)。则输出尺寸\((OH, OW)\)的计算公式为
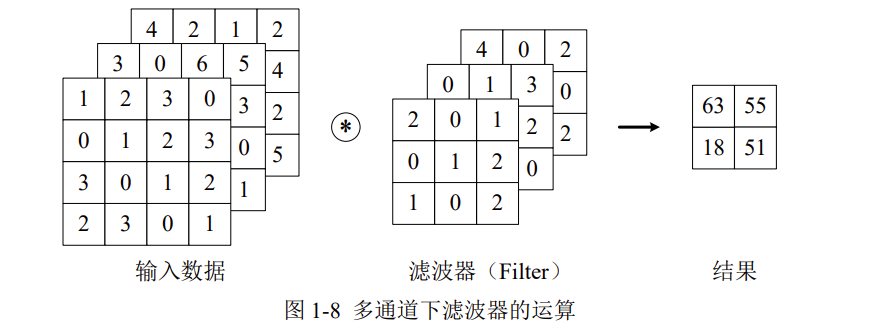
多通道
在上一小节讲的卷积层,仅仅针对二维的输入与输出数据(一般是灰度图像),可称之为单通道。但是,彩色图像除了高、长两个维度之外,还有第三个维度:通道(channel)。例如,以 RGB 三原色为基础的彩色图像,其通道方向就有红、黄、蓝三部分,可视为 3 个单通道二维图像的混合叠加。
一般的,当输入数据是二维时,权重被称为卷积核(Kernel);当输入数据是三维或更高时,权重被称为滤波器(Filter)。
多通道输入
对三位数据的卷积操作如下图所示,输入数据与滤波器的通道数必须要设为相同的值,可以发现,这种情况下的输出结果降级为二维。
将数据和滤波器看作长方体,如下图所示:
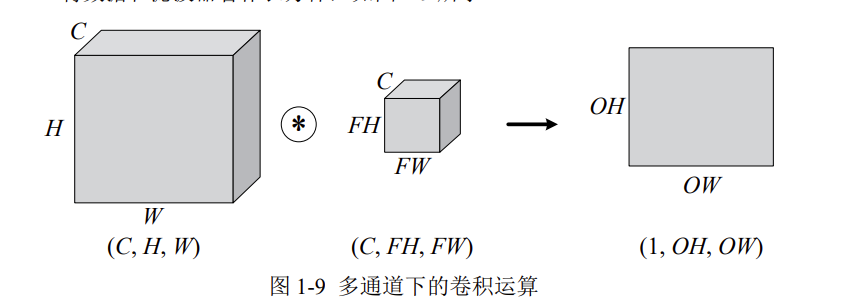
C、H、W是固定的顺序,通道数要写在高与宽的前面。
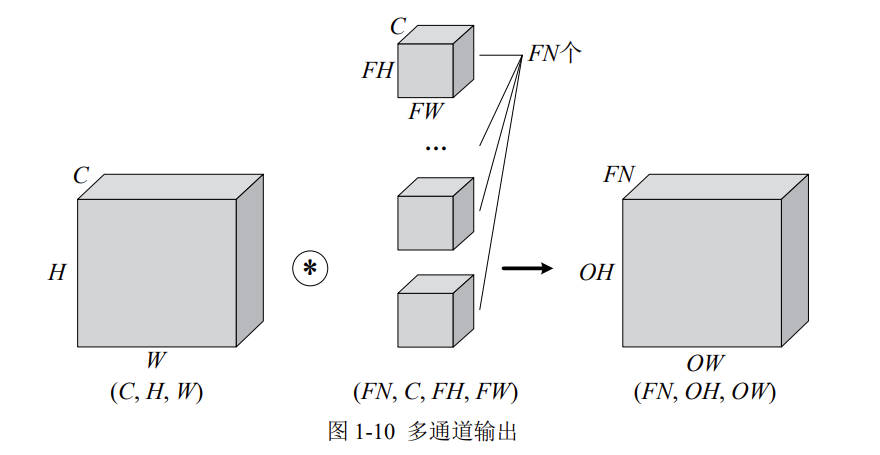
多通道输出
上文,仅通过一个卷积层,三维就被降成了二维。大多数时候我们想让三维的特征多经过几个卷积层,因此就需要多通道输出。
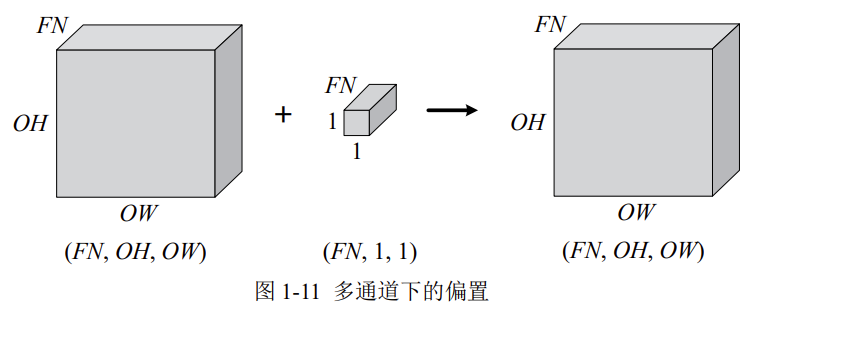
当然,卷积运算中存在偏置,如果进一步追加偏置的加法运算处理,则结果如下图所示,每个通道都有一个单独的偏置。
汇聚
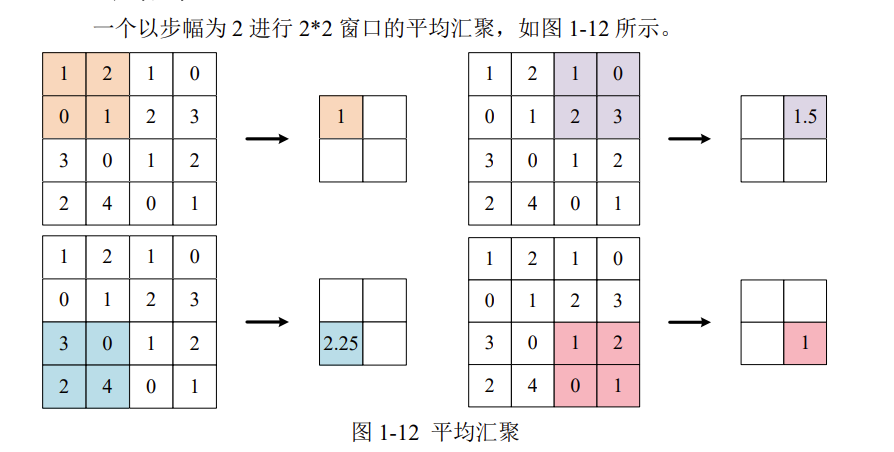
汇聚(Pooling)仅仅是从一定范围内提取一个特征值,所以不存在要学习的内部参数。一般有平均汇聚与最大值汇聚。
平均汇聚
最大值汇聚
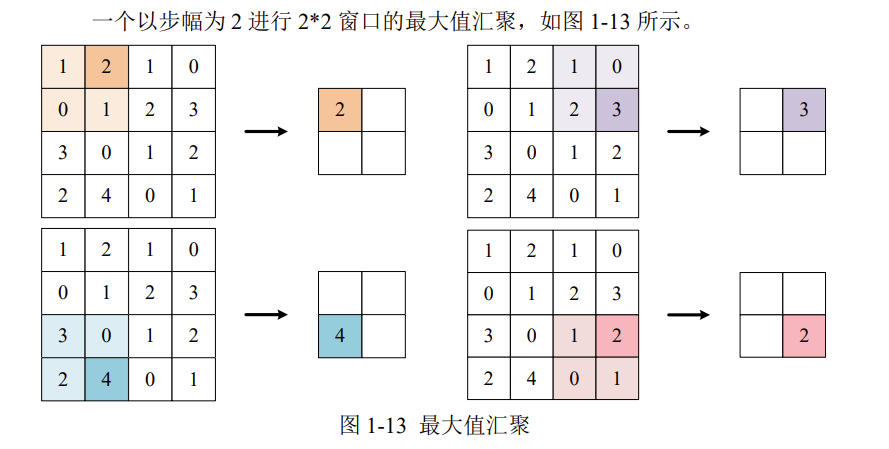
汇聚对图像的高H和宽W进行特征提取,不改变通道数C。
尺寸变换总结
卷积层
现在假设卷积层的填充为P,步幅为S,由
- 输入数据的尺寸是:(C,H,W)
- 滤波器的尺寸是:(FN,C,FH,FW)
- 输出数据的尺寸是:(FN,OH,OW)
可得:
汇聚
现在假设汇聚的步幅为S,由
- 输入数据的尺寸是:(C,H,W)
- 输出数据的尺寸是:(C,OH,OW)
可得:
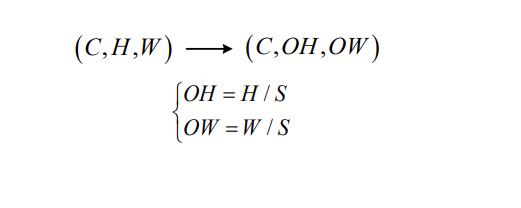
注意这里公式感觉有点问题,图片中的公式是在以下特殊条件下才成立:
- 池化窗口大小 = 步幅(即 FH = FW = S)
- 没有填充(P = 0)
- 输入尺寸能被步幅整除
LeNet-5
网格结构
LeNet-5 虽诞生于 1998 年,但基于它的手写数字识别系统则非常成功。
该网络共 7 层,输入图像尺寸为 28×28,输出则是 10 个神经元,分别表示某手写数字是 0 至 9 的概率。
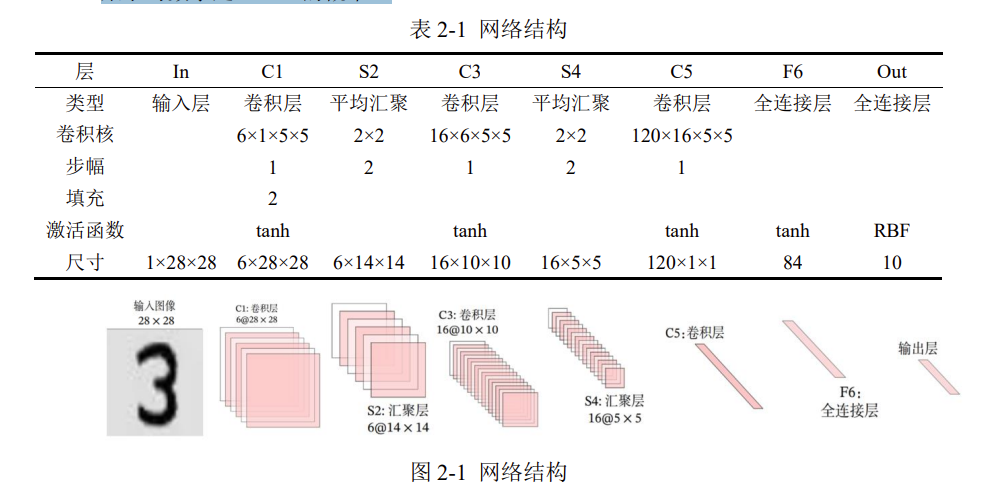
注:输出层由 10 个径向基函数 RBF 组成,用于归一化最终的结果,目前 RBF 已被 Softmax 取代。
根据网络结构,在 PyTorch 的 nn.Sequential 中编写为:
self.net = nn.Sequential(
nn.Conv2d(1, 6, kernel_size=5, padding=2), nn.Tanh(), # C1:卷积层
nn.AvgPool2d(kernel_size=2, stride=2), # S2:平均汇聚
nn.Conv2d(6, 16, kernel_size=5), nn.Tanh(), # C3:卷积层
nn.AvgPool2d(kernel_size=2, stride=2), # S4:平均汇聚
nn.Conv2d(16, 120, kernel_size=5), nn.Tanh(), # C5:卷积层
nn.Flatten(), # 把图像铺平成一维
nn.Linear(120, 84), nn.Tanh(), # F5:全连接层
nn.Linear(84, 10) # F6:全连接层
)
其中,nn.Conv2d()需要四个参数,分别为
- in_channel:此层输入图像的通道数;
- out_channel:此层输出图像的通道数;
- kernel_size:卷积核尺寸;
- padding:填充;
- stride:步幅。
import torch
import torch.nn as nn
from torch.utils.data import DataLoader
from torchvision import transforms
from torchvision import datasets
import matplotlib.pyplot as plt
%matplotlib inline
# 展示高清图
from matplotlib_inline import backend_inline
backend_inline.set_matplotlib_formats('svg')
# 制作数据集
# 数据集转换参数
transform = transforms.Compose([
transforms.ToTensor(),
transforms.Normalize(0.1307, 0.3081)
])
# 下载训练集与测试集
train_Data = datasets.MNIST(
root = '/kaggle/working/dataset/mnist/', # 下载路径
train = True, # 是 train 集
download = True, # 如果该路径没有该数据集,就下载
transform = transform # 数据集转换参数
)
test_Data = datasets.MNIST(
root = '/kaggle/working/dataset/mnist/', # 下载路径
train = False, # 是 test 集
download = True, # 如果该路径没有该数据集,就下载
transform = transform # 数据集转换参数
)
100%|██████████| 9.91M/9.91M [00:00<00:00, 41.1MB/s]
100%|██████████| 28.9k/28.9k [00:00<00:00, 1.15MB/s]
100%|██████████| 1.65M/1.65M [00:00<00:00, 9.86MB/s]
100%|██████████| 4.54k/4.54k [00:00<00:00, 14.0MB/s]
# 批次加载器
train_loader = DataLoader(train_Data, shuffle=True, batch_size=256)
test_loader = DataLoader(test_Data, shuffle=False, batch_size=256)
搭建神经网络
class CNN(nn.Module):
def __init__(self):
super(CNN,self).__init__()
self.net = nn.Sequential(
nn.Conv2d(1, 6, kernel_size=5, padding=2), nn.Tanh(),
nn.AvgPool2d(kernel_size=2, stride=2),
nn.Conv2d(6, 16, kernel_size=5), nn.Tanh(),
nn.AvgPool2d(kernel_size=2, stride=2),
nn.Conv2d(16, 120, kernel_size=5), nn.Tanh(),
nn.Flatten(),
nn.Linear(120, 84), nn.Tanh(),
nn.Linear(84, 10)
)
def forward(self, x):
y = self.net(x)
return y
# 查看网络结构
X = torch.rand(size= (1, 1, 28, 28))
for layer in CNN().net:
X = layer(X)
print( layer.__class__.__name__, 'output shape: \t', X.shape )
Conv2d output shape: torch.Size([1, 6, 28, 28])
Tanh output shape: torch.Size([1, 6, 28, 28])
AvgPool2d output shape: torch.Size([1, 6, 14, 14])
Conv2d output shape: torch.Size([1, 16, 10, 10])
Tanh output shape: torch.Size([1, 16, 10, 10])
AvgPool2d output shape: torch.Size([1, 16, 5, 5])
Conv2d output shape: torch.Size([1, 120, 1, 1])
Tanh output shape: torch.Size([1, 120, 1, 1])
Flatten output shape: torch.Size([1, 120])
Linear output shape: torch.Size([1, 84])
Tanh output shape: torch.Size([1, 84])
Linear output shape: torch.Size([1, 10])
# 创建子类的实例,并搬到 GPU 上
model = CNN().to('cuda:0')
# 损失函数的选择
loss_fn = nn.CrossEntropyLoss() # 自带 softmax 激活函数
# 优化算法的选择
learning_rate = 0.9 # 设置学习率
optimizer = torch.optim.SGD(
model.parameters(),
lr = learning_rate,
)
# 训练网络
epochs = 5
losses = [] # 记录损失函数变化的列表
for epoch in range(epochs):
for (x, y) in train_loader: # 获取小批次的 x 与 y
x, y = x.to('cuda:0'), y.to('cuda:0')
Pred = model(x) # 一次前向传播(小批量)
loss = loss_fn(Pred, y) # 计算损失函数
losses.append(loss.item()) # 记录损失函数的变化
optimizer.zero_grad() # 清理上一轮滞留的梯度
loss.backward() # 一次反向传播
optimizer.step() # 优化内部参数
Fig = plt.figure()
plt.plot(range(len(losses)), losses)
plt.show()

# 测试网络
correct = 0
total = 0
with torch.no_grad(): # 该局部关闭梯度计算功能
for (x, y) in test_loader: # 获取小批次的 x 与 y
x, y = x.to('cuda:0'), y.to('cuda:0')
Pred = model(x) # 一次前向传播(小批量)
_, predicted = torch.max(Pred.data, dim=1)
correct += torch.sum( (predicted == y) )
total += y.size(0)
print(f'测试集精准度: {100*correct/total} %')
测试集精准度: 98.5199966430664 %
AlexNet
网格结构
AlexNet 是第一个现代深度卷积网络模型,其首次使用了很多现代网络的技术方法,作为 2012 年 ImageNet 图像分类竞赛冠军,输入为 3×224×224 的图像,输出为 1000 个类别的条件概率。
考虑到如果使用 ImageNet 训练集会导致训练时间过长,这里使用稍低一档的 1×28×28 的 MNIST 数据集,并手动将其分辨率从 1×28×28 提到 1×224×224,同时输出从 1000 个类别降到 10 个,修改后的网络结构见表 3-1。
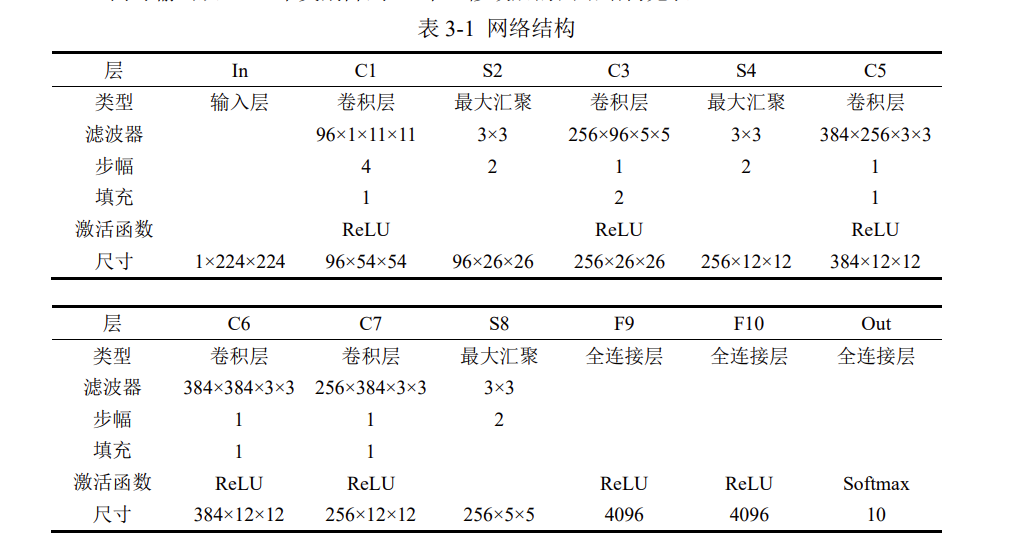
根据网络结构,在 PyTorch 的 nn.Sequential 中编写为
self.net = nn.Sequential(
nn.Conv2d(1, 96, kernel_size=11, stride=4, padding=1), nn.ReLU(),
nn.MaxPool2d(kernel_size=3, stride=2),
nn.Conv2d(96, 256, kernel_size=5, padding=2), nn.ReLU(),
nn.MaxPool2d(kernel_size=3, stride=2),
nn.Conv2d(256, 384, kernel_size=3, padding=1), nn.ReLU(),
nn.Conv2d(384, 384, kernel_size=3, padding=1), nn.ReLU(),
nn.Conv2d(384, 256, kernel_size=3, padding=1), nn.ReLU(),
nn.MaxPool2d(kernel_size=3, stride=2),
nn.Flatten(),
nn.Linear(6400, 4096), nn.ReLU(),
nn.Dropout(p=0.5), # Dropout——随机丢弃权重
nn.Linear(4096, 4096), nn.ReLU(),
nn.Dropout(p=0.5), # 按概率 p 随机丢弃突触
nn.Linear(4096, 10)
)
# 制作数据集
# 数据集转换参数
transform = transforms.Compose([
transforms.ToTensor(),
transforms.Resize(224),
transforms.Normalize(0.1307, 0.3081)
])
# 下载训练集与测试集
train_Data = datasets.FashionMNIST(
root = '/kaggle/working/dataset/mnist/',
train = True,
download = True,
transform = transform
)
test_Data = datasets.FashionMNIST(
root = '/kaggle/working/dataset/mnist/',
train = False,
download = True,
transform = transform
)
# 批次加载器
train_loader = DataLoader(train_Data, shuffle=True, batch_size=128)
test_loader = DataLoader(test_Data, shuffle=False, batch_size=128)
class CNN(nn.Module):
def __init__(self):
super(CNN,self).__init__()
self.net = nn.Sequential(
nn.Conv2d(1, 96, kernel_size=11, stride=4, padding=1),
nn.ReLU(),
nn.MaxPool2d(kernel_size=3, stride=2),
nn.Conv2d(96, 256, kernel_size=5, padding=2),
nn.ReLU(),
nn.MaxPool2d(kernel_size=3, stride=2),
nn.Conv2d(256, 384, kernel_size=3, padding=1),
nn.ReLU(),
nn.Conv2d(384, 384, kernel_size=3, padding=1),
nn.ReLU(),
nn.Conv2d(384, 256, kernel_size=3, padding=1),
nn.ReLU(),
nn.MaxPool2d(kernel_size=3, stride=2),
nn.Flatten(),
nn.Linear(6400, 4096), nn.ReLU(),
nn.Dropout(p=0.5),
nn.Linear(4096, 4096), nn.ReLU(),
nn.Dropout(p=0.5),
nn.Linear(4096, 10)
)
def forward(self, x):
y = self.net(x)
return y
# 查看网络结构
X = torch.rand(size= (1, 1, 224, 224))
for layer in CNN().net:
X = layer(X)
print( layer.__class__.__name__, 'output shape: \t', X.shape )
Conv2d output shape: torch.Size([1, 96, 54, 54])
ReLU output shape: torch.Size([1, 96, 54, 54])
MaxPool2d output shape: torch.Size([1, 96, 26, 26])
Conv2d output shape: torch.Size([1, 256, 26, 26])
ReLU output shape: torch.Size([1, 256, 26, 26])
MaxPool2d output shape: torch.Size([1, 256, 12, 12])
Conv2d output shape: torch.Size([1, 384, 12, 12])
ReLU output shape: torch.Size([1, 384, 12, 12])
Conv2d output shape: torch.Size([1, 384, 12, 12])
ReLU output shape: torch.Size([1, 384, 12, 12])
Conv2d output shape: torch.Size([1, 256, 12, 12])
ReLU output shape: torch.Size([1, 256, 12, 12])
MaxPool2d output shape: torch.Size([1, 256, 5, 5])
Flatten output shape: torch.Size([1, 6400])
Linear output shape: torch.Size([1, 4096])
ReLU output shape: torch.Size([1, 4096])
Dropout output shape: torch.Size([1, 4096])
Linear output shape: torch.Size([1, 4096])
ReLU output shape: torch.Size([1, 4096])
Dropout output shape: torch.Size([1, 4096])
Linear output shape: torch.Size([1, 10])
# 创建子类的实例,并搬到 GPU 上
model = CNN().to('cuda:0')
# 损失函数的选择
loss_fn = nn.CrossEntropyLoss() # 自带 softmax 激活函数
# 优化算法的选择
learning_rate = 0.1 # 设置学习率
optimizer = torch.optim.SGD(
model.parameters(),
lr = learning_rate,
)
# 训练网络
epochs = 10
losses = [] # 记录损失函数变化的列表
for epoch in range(epochs):
for (x, y) in train_loader: # 获取小批次的 x 与 y
x, y = x.to('cuda:0'), y.to('cuda:0')
Pred = model(x) # 一次前向传播(小批量)
loss = loss_fn(Pred, y) # 计算损失函数
losses.append(loss.item()) # 记录损失函数的变化
optimizer.zero_grad() # 清理上一轮滞留的梯度
loss.backward() # 一次反向传播
optimizer.step() # 优化内部参数
Fig = plt.figure()
plt.plot(range(len(losses)), losses)
plt.show()

# 测试网络
correct = 0
total = 0
with torch.no_grad(): # 该局部关闭梯度计算功能
for (x, y) in test_loader: # 获取小批次的 x 与 y
x, y = x.to('cuda:0'), y.to('cuda:0')
Pred = model(x) # 一次前向传播(小批量)
_, predicted = torch.max(Pred.data, dim=1)
correct += torch.sum( (predicted == y) )
total += y.size(0)
print(f'测试集精准度: {100*correct/total} %')
测试集精准度: 91.22000122070312 %
GoogLeNet
网格结构
2014 年,获得 ImageNet 图像分类竞赛的冠军是 GoogLeNet,其解决了一个重要问题:滤波器超参数选择困难,如何能够自动找到最佳的情况。
其在网络中引入了一个小网络——Inception 块,由 4 条并行路径组成,4 条路径互不干扰。这样一来,超参数最好的分支的那条分支,其权重会在训练过程中不断增加,这就类似于帮我们挑选最佳的超参数,如示例所示。
# 一个 Inception 块
class Inception(nn.Module):
def __init__(self, in_channels):
super(Inception, self).__init__()
self.branch1 = nn.Conv2d(in_channels, 16, kernel_size=1)
self.branch2 = nn.Sequential(
nn.Conv2d(in_channels, 16, kernel_size=1),
nn.Conv2d(16, 24, kernel_size=3, padding=1),
nn.Conv2d(24, 24, kernel_size=3, padding=1)
)
self.branch3 = nn.Sequential(
nn.Conv2d(in_channels, 16, kernel_size=1),
nn.Conv2d(16, 24, kernel_size=5, padding=2)
)
self.branch4 = nn.Conv2d(in_channels, 24, kernel_size=1)
def forward(self, x):
branch1 = self.branch1(x)
branch2 = self.branch2(x)
branch3 = self.branch3(x)
branch4 = self.branch4(x)
outputs = [branch1, branch2, branch3, branch4]
return torch.cat(outputs, 1)
此外,分支 2 和分支 3 上增加了额外 1×1 的滤波器,这是为了减少通道数,降低模型复杂度。 GoogLeNet 之所以叫 GoogLeNet,是为了向 LeNet 致敬,其网络结构为
class CNN(nn.Module):
def __init__(self):
super(CNN, self).__init__()
self.net = nn.Sequential(
nn.Conv2d(1, 10, kernel_size=5), nn.ReLU(),
nn.MaxPool2d(kernel_size=2, stride=2),
Inception(in_channels=10),
nn.Conv2d(88, 20, kernel_size=5), nn.ReLU(),
nn.MaxPool2d(kernel_size=2, stride=2),
Inception(in_channels=20),
nn.Flatten(),
nn.Linear(1408, 10)
)
def forward(self, x):
y = self.net(x)
return y
# 制作数据集
# 数据集转换参数
transform = transforms.Compose([
transforms.ToTensor(),
transforms.Normalize(0.1307, 0.3081)
])
# 下载训练集与测试集
train_Data = datasets.FashionMNIST(
root = '/kaggle/working/dataset/mnist/',
train = True,
download = True,
transform = transform
)
test_Data = datasets.FashionMNIST(
root = '/kaggle/working/dataset/mnist/',
train = False,
download = True,
transform = transform
)
# 批次加载器
train_loader = DataLoader(train_Data, shuffle=True, batch_size=128)
test_loader = DataLoader(test_Data, shuffle=False, batch_size=128)
# 一个 Inception 块
class Inception(nn.Module):
def __init__(self, in_channels):
super(Inception, self).__init__()
self.branch1 = nn.Conv2d(in_channels, 16, kernel_size=1)
self.branch2 = nn.Sequential(
nn.Conv2d(in_channels, 16, kernel_size=1),
nn.Conv2d(16, 24, kernel_size=3, padding=1),
nn.Conv2d(24, 24, kernel_size=3, padding=1)
)
self.branch3 = nn.Sequential(
nn.Conv2d(in_channels, 16, kernel_size=1),
nn.Conv2d(16, 24, kernel_size=5, padding=2)
)
self.branch4 = nn.Conv2d(in_channels, 24, kernel_size=1)
def forward(self, x):
branch1 = self.branch1(x)
branch2 = self.branch2(x)
branch3 = self.branch3(x)
branch4 = self.branch4(x)
outputs = [branch1, branch2, branch3, branch4]
return torch.cat(outputs, 1)
class CNN(nn.Module):
def __init__(self):
super(CNN, self).__init__()
self.net = nn.Sequential(
nn.Conv2d(1, 10, kernel_size=5), nn.ReLU(),
nn.MaxPool2d(kernel_size=2, stride=2),
Inception(in_channels=10),
nn.Conv2d(88, 20, kernel_size=5), nn.ReLU(),
nn.MaxPool2d(kernel_size=2, stride=2),
Inception(in_channels=20),
nn.Flatten(),
nn.Linear(1408, 10)
)
def forward(self, x):
y = self.net(x)
return y
# 查看网络结构
X = torch.rand(size= (1, 1, 28, 28))
for layer in CNN().net:
X = layer(X)
print( layer.__class__.__name__, 'output shape: \t', X.shape )
Conv2d output shape: torch.Size([1, 10, 24, 24])
ReLU output shape: torch.Size([1, 10, 24, 24])
MaxPool2d output shape: torch.Size([1, 10, 12, 12])
Inception output shape: torch.Size([1, 88, 12, 12])
Conv2d output shape: torch.Size([1, 20, 8, 8])
ReLU output shape: torch.Size([1, 20, 8, 8])
MaxPool2d output shape: torch.Size([1, 20, 4, 4])
Inception output shape: torch.Size([1, 88, 4, 4])
Flatten output shape: torch.Size([1, 1408])
Linear output shape: torch.Size([1, 10])
# 创建子类的实例,并搬到 GPU 上
model = CNN().to('cuda:0')
# 损失函数的选择
loss_fn = nn.CrossEntropyLoss()
# 优化算法的选择
learning_rate = 0.1 # 设置学习率
optimizer = torch.optim.SGD(
model.parameters(),
lr = learning_rate,
)
# 训练网络
epochs = 10
losses = [] # 记录损失函数变化的列表
for epoch in range(epochs):
for (x, y) in train_loader: # 获取小批次的 x 与 y
x, y = x.to('cuda:0'), y.to('cuda:0')
Pred = model(x) # 一次前向传播(小批量)
loss = loss_fn(Pred, y) # 计算损失函数
losses.append(loss.item()) # 记录损失函数的变化
optimizer.zero_grad() # 清理上一轮滞留的梯度
loss.backward() # 一次反向传播
optimizer.step() # 优化内部参数
Fig = plt.figure()
plt.plot(range(len(losses)), losses)
plt.show()

# 测试网络
correct = 0
total = 0
with torch.no_grad(): # 该局部关闭梯度计算功能
for (x, y) in test_loader: # 获取小批次的 x 与 y
x, y = x.to('cuda:0'), y.to('cuda:0')
Pred = model(x) # 一次前向传播(小批量)
_, predicted = torch.max(Pred.data, dim=1)
correct += torch.sum( (predicted == y) )
total += y.size(0)
print(f'测试集精准度: {100*correct/total} %')
测试集精准度: 89.58999633789062 %
ResNet
网格结构
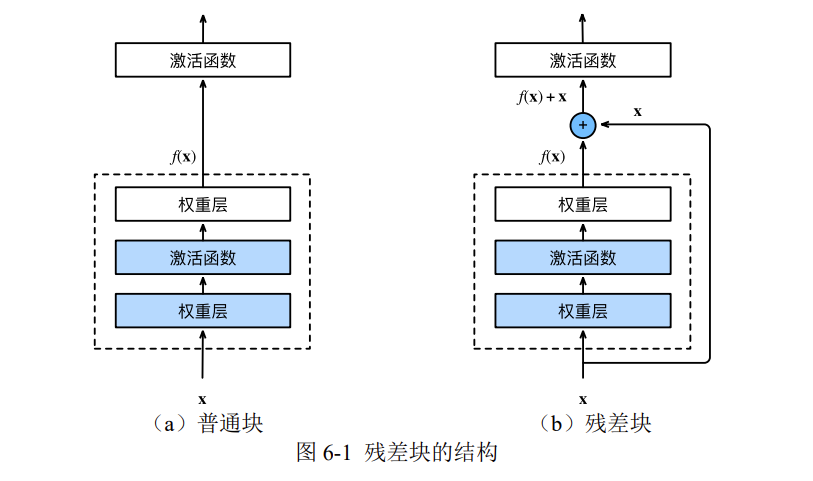
残差网络(Residual Network,ResNet)荣获 2015 年的 ImageNet 图像分类竞赛冠军,其可以缓解深度神经网络中增加深度带来的“梯度消失”问题。
在反向传播计算梯度时,梯度是不断相乘的,假如训练到后期,各层的梯度均小于 1,则其相乘起来就会不断趋于 0。因此,深度学习的隐藏层并非越多越好,隐藏层越深,梯度越趋于 0,此之谓“梯度消失”。
而残差块将某模块的输入 x 引到输出 y 处,使原本的梯度\(dy/dx\)变成了\((dy + dx) / dx\),也即\((dy / dx + 1),\)这样一来梯度就不会消失了。
# 制作数据集
# 数据集转换参数
transform = transforms.Compose([
transforms.ToTensor(),
transforms.Normalize(0.1307, 0.3081)
])
# 下载训练集与测试集
train_Data = datasets.FashionMNIST(
root = '/kaggle/working/dataset/mnist/',
train = True,
download = True,
transform = transform
)
test_Data = datasets.FashionMNIST(
root = '/kaggle/working/dataset/mnist/',
train = False,
download = True,
transform = transform
)
# 批次加载器
train_loader = DataLoader(train_Data, shuffle=True, batch_size=128)
test_loader = DataLoader(test_Data, shuffle=False, batch_size=128)
# 残差块
class ResidualBlock(nn.Module):
def __init__(self, channels):
super(ResidualBlock, self).__init__()
self.net = nn.Sequential(
nn.Conv2d(channels, channels, kernel_size=3, padding=1),
nn.ReLU(),
nn.Conv2d(channels, channels, kernel_size=3, padding=1),
)
def forward(self, x):
y = self.net(x)
return nn.functional.relu(x+y)
class CNN(nn.Module):
def __init__(self):
super(CNN, self).__init__()
self.net = nn.Sequential(
nn.Conv2d(1, 16, kernel_size=5), nn.ReLU(),
nn.MaxPool2d(2), ResidualBlock(16),
nn.Conv2d(16, 32, kernel_size=5), nn.ReLU(),
nn.MaxPool2d(2), ResidualBlock(32),
nn.Flatten(),
nn.Linear(512, 10)
)
def forward(self, x):
y = self.net(x)
return y
# 查看网络结构
X = torch.rand(size= (1, 1, 28, 28))
for layer in CNN().net:
X = layer(X)
print( layer.__class__.__name__, 'output shape: \t', X.shape )
Conv2d output shape: torch.Size([1, 16, 24, 24])
ReLU output shape: torch.Size([1, 16, 24, 24])
MaxPool2d output shape: torch.Size([1, 16, 12, 12])
ResidualBlock output shape: torch.Size([1, 16, 12, 12])
Conv2d output shape: torch.Size([1, 32, 8, 8])
ReLU output shape: torch.Size([1, 32, 8, 8])
MaxPool2d output shape: torch.Size([1, 32, 4, 4])
ResidualBlock output shape: torch.Size([1, 32, 4, 4])
Flatten output shape: torch.Size([1, 512])
Linear output shape: torch.Size([1, 10])
# 创建子类的实例,并搬到 GPU 上
model = CNN().to('cuda:0')
# 损失函数的选择
loss_fn = nn.CrossEntropyLoss()
# 优化算法的选择
learning_rate = 0.1 # 设置学习率
optimizer = torch.optim.SGD(
model.parameters(),
lr = learning_rate,
)
# 训练网络
epochs = 10
losses = [] # 记录损失函数变化的列表
for epoch in range(epochs):
for (x, y) in train_loader: # 获取小批次的 x 与 y
x, y = x.to('cuda:0'), y.to('cuda:0')
Pred = model(x) # 一次前向传播(小批量)
loss = loss_fn(Pred, y) # 计算损失函数
losses.append(loss.item()) # 记录损失函数的变化
optimizer.zero_grad() # 清理上一轮滞留的梯度
loss.backward() # 一次反向传播
optimizer.step() # 优化内部参数
Fig = plt.figure()
plt.plot(range(len(losses)), losses)
plt.show()

# 测试网络
correct = 0
total = 0
with torch.no_grad(): # 该局部关闭梯度计算功能
for (x, y) in test_loader: # 获取小批次的 x 与 y
x, y = x.to('cuda:0'), y.to('cuda:0')
Pred = model(x) # 一次前向传播(小批量)
_, predicted = torch.max(Pred.data, dim=1)
correct += torch.sum( (predicted == y) )
total += y.size(0)
print(f'测试集精准度: {100*correct/total} %')
测试集精准度: 90.04000091552734 %